272
272 Система використовує імітаційне навчання та аналізує відеозаписи реальних операцій. Про розробку повідомляє пресслужба Університету Джонса Гопкінса.
Дослідники з Університету Джонса Гопкінса та Стенфордського університету навчили хірургічного робота виконувати складні медичні процедури з високою точністю. Щоб досягти цього, вони використовували імітаційне навчання: робот повторював дії, які освоїв шляхом перегляду сотень відеозаписів реальних хірургічних операцій.

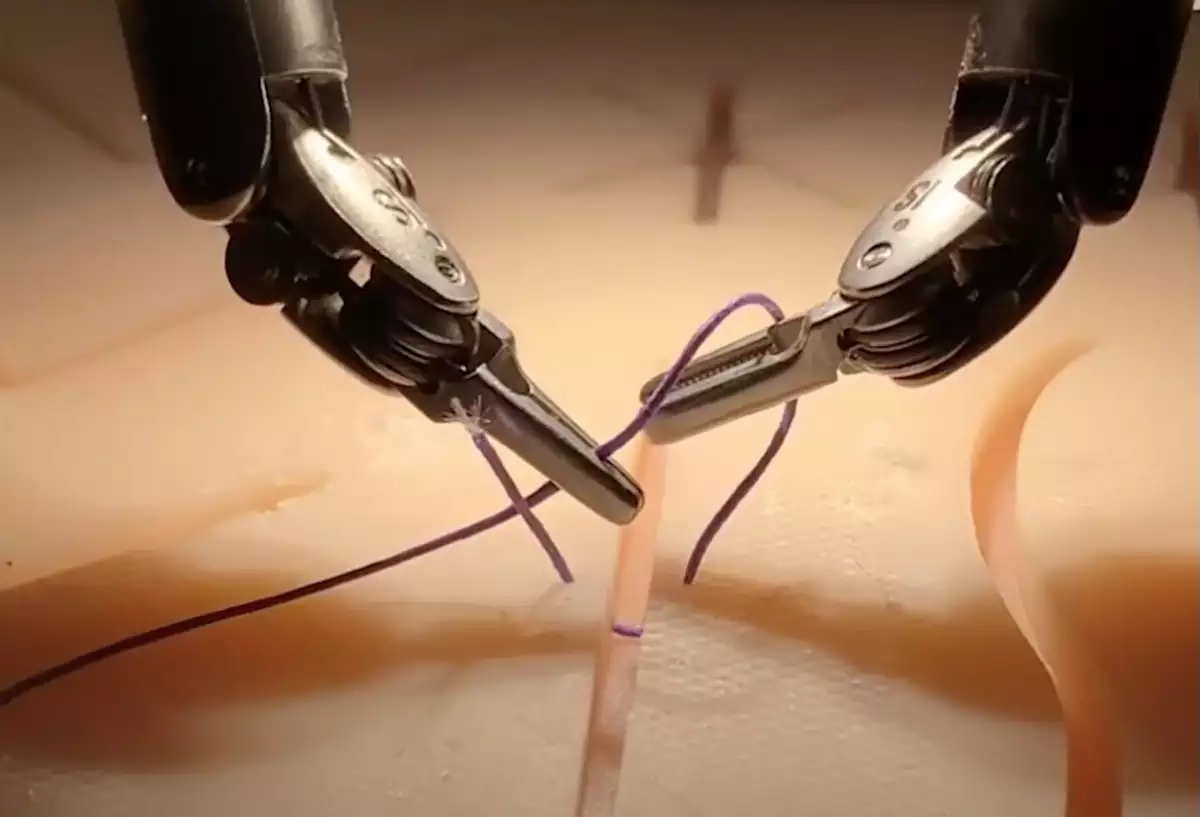
Система використовує ту саму архітектуру машинного навчання, що й система ChatGPT, але замість мови і тексту вона “говорить мовою робота” – використовує кінематику і математичні вирази для управління рухами хірургічного маніпулятора. Після перегляду відео з камер, встановлених на руках роботів da Vinci під час операцій, модель відтворила ті самі хірургічні процедури з рівнем майстерності, порівнянним із досвідченими лікарями.
Робот-хірург
За словами розробників, ключовим моментом було навчання моделі розуміти окремі рухи, а не заучувати конкретні процедури – послідовності дій. “Усе, що нам потрібно, – це введення зображення, а потім ця система ШІ знаходить правильне рішення”, – зазначив Джі Вун “Брайан” Кім, співавтор дослідження.
Модель так добре вчиться речей, яких ми її не вчили. Наприклад, якщо вона впустить голку, вона автоматично підніме її і продовжить. Це не те, чого я її вчив, – говорить Аксель Крігер, співавтор дослідження з Університету Джона Г’юза
Автори дослідження стверджують, що підхід усуває необхідність ретельного програмування роботів для кожного окремого кроку медичної процедури, відкриваючи шлях до справжньої автономності хірургічних роботів. Тепер вони можуть швидко навчатися виконання практично будь-яких операцій, скорочуючи ризик лікарських помилок і підвищуючи точність хірургічних втручань.
Це дійсно чудово мати цю модель. Ми вважаємо, що це знаменує собою значний крок вперед до нового рубежу в медичній робототехніці, -говорить Аксель Крігер, співавтор дослідження з Університету Джона Г’юза